SCARA robots excel in precision assembly with their rigid four-axis design, ideal for horizontal movements and moderate-speed tasks. Delta robots offer superior speed and agility through their lightweight structure and parallel kinematics, making them perfect for high-speed sorting and packaging applications. Discover detailed comparisons to determine which robot fits your specific automation needs.
Main Difference
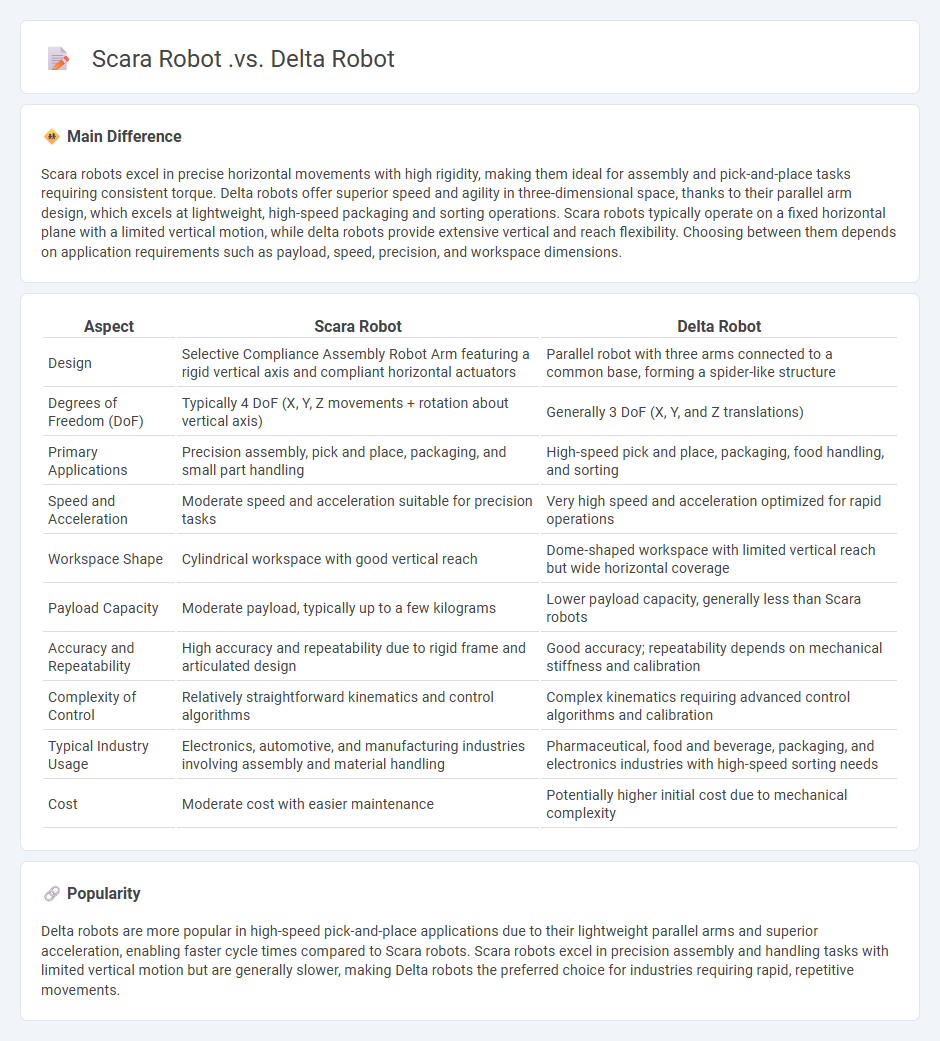
Scara robots excel in precise horizontal movements with high rigidity, making them ideal for assembly and pick-and-place tasks requiring consistent torque. Delta robots offer superior speed and agility in three-dimensional space, thanks to their parallel arm design, which excels at lightweight, high-speed packaging and sorting operations. Scara robots typically operate on a fixed horizontal plane with a limited vertical motion, while delta robots provide extensive vertical and reach flexibility. Choosing between them depends on application requirements such as payload, speed, precision, and workspace dimensions.
Connection
Scara robots and delta robots share a focus on high-speed, precise pick-and-place operations commonly used in manufacturing and packaging industries. Both robot types utilize parallel kinematic structures that enable rapid, repeatable motion with minimal inertia. Their design principles optimize efficiency in tasks requiring quick, accurate movement within a defined workspace.
Comparison Table
| Aspect | Scara Robot | Delta Robot |
|---|---|---|
| Design | Selective Compliance Assembly Robot Arm featuring a rigid vertical axis and compliant horizontal actuators | Parallel robot with three arms connected to a common base, forming a spider-like structure |
| Degrees of Freedom (DoF) | Typically 4 DoF (X, Y, Z movements + rotation about vertical axis) | Generally 3 DoF (X, Y, and Z translations) |
| Primary Applications | Precision assembly, pick and place, packaging, and small part handling | High-speed pick and place, packaging, food handling, and sorting |
| Speed and Acceleration | Moderate speed and acceleration suitable for precision tasks | Very high speed and acceleration optimized for rapid operations |
| Workspace Shape | Cylindrical workspace with good vertical reach | Dome-shaped workspace with limited vertical reach but wide horizontal coverage |
| Payload Capacity | Moderate payload, typically up to a few kilograms | Lower payload capacity, generally less than Scara robots |
| Accuracy and Repeatability | High accuracy and repeatability due to rigid frame and articulated design | Good accuracy; repeatability depends on mechanical stiffness and calibration |
| Complexity of Control | Relatively straightforward kinematics and control algorithms | Complex kinematics requiring advanced control algorithms and calibration |
| Typical Industry Usage | Electronics, automotive, and manufacturing industries involving assembly and material handling | Pharmaceutical, food and beverage, packaging, and electronics industries with high-speed sorting needs |
| Cost | Moderate cost with easier maintenance | Potentially higher initial cost due to mechanical complexity |
Kinematics
Kinematics in engineering focuses on the motion of objects without considering the forces causing them, analyzing parameters like displacement, velocity, and acceleration. This field underpins the design and control of mechanical systems such as robotics, automotive suspensions, and aerospace mechanisms. Precision in kinematic analysis enables engineers to predict the behavior of moving parts, enhancing performance and safety. Advanced computational tools like CAD and simulation software further optimize kinematic evaluations in complex engineering projects.
Payload Capacity
Payload capacity in engineering refers to the maximum weight a vehicle, structure, or system can safely carry or transport without compromising its integrity or performance. It is a critical factor in the design of aircraft, spacecraft, trucks, and cranes, directly influencing operational efficiency and safety standards. Engineers calculate payload capacity by considering factors such as structural strength, material properties, and load distribution. Accurate determination ensures compliance with regulatory requirements and optimizes resource utilization.
Workspace Geometry
Workspace geometry in engineering defines the spatial boundaries within which a machine or robotic arm operates effectively, ensuring precision and safety. It encompasses factors such as reach, orientation, and collision zones, crucial for designing automated systems like CNC machines and industrial robots. Accurate workspace geometry analysis improves operational efficiency, reduces mechanical stress, and prevents damage to equipment and surroundings. Advanced simulation tools use workspace geometry data to optimize robot paths and enhance system performance in manufacturing processes.
Speed and Precision
Speed in engineering enhances project delivery by streamlining design and manufacturing processes through advanced automation and computer-aided tools. Precision is achieved using high-resolution sensors, CNC machines, and real-time data analytics that minimize tolerances and errors. Combining rapid prototyping with precise measurements accelerates product development while maintaining quality and reliability. Innovations such as AI-driven simulations and additive manufacturing further optimize efficiency and accuracy in engineering workflows.
Industrial Applications
Industrial applications in engineering encompass automation systems, robotics, and materials processing, driving efficiency and innovation across manufacturing sectors. Advanced control systems enable precise monitoring and optimization of production lines, reducing downtime and operational costs. Engineering innovations in additive manufacturing, such as 3D printing with metals and polymers, facilitate rapid prototyping and custom component fabrication. Integration of Internet of Things (IoT) technologies in industrial processes enhances real-time data analytics for improved decision-making and predictive maintenance.
Source and External Links
How to Choose Between Delta vs. SCARA Robots - Engineering.com - SCARA robots are generally cheaper, more compact, and better for tasks requiring assembly and deeper strokes, while Delta robots excel in very high-speed pick-and-place operations owing to stationary motors that allow faster movement.
Delta, Scara, 6-axis robots: which is better for education? - Niryo - SCARA robots tend to be smaller, less expensive, and compact, suitable for pick-and-place and assembly, whereas Delta robots are larger, mounted typically on ceilings, and better for large workspace, high-speed sorting and inspection tasks.
The Basics Of 6-Axis, SCARA, Delta And Collaborative Robots - CrossCo - Delta robots offer very high speed with light loads ideal for sorting and conveyor tracking, but have limited vertical work area and maintenance needs; SCARA robots provide high speed, rigidity, and repeatability with somewhat larger payload capabilities and suitability for horizontal plane tasks.
FAQs
What is a SCARA robot?
A SCARA robot (Selective Compliance Assembly Robot Arm) is a robotic arm designed for high-speed, precise, and flexible assembly tasks, characterized by its rigid vertical movement and compliant horizontal movement, commonly used in electronics, automotive manufacturing, and packaging industries.
What is a Delta robot?
A Delta robot is a type of parallel robot with three arms connected to universal joints at the base, designed for high-speed and precise pick-and-place tasks in automation and manufacturing.
What are the key differences between SCARA and Delta robots?
SCARA robots feature a rigid arm design ideal for horizontal movements with high precision and payload capacity, while Delta robots use parallel arms for fast, lightweight, and highly dynamic pick-and-place tasks with superior speed and repeatability.
How are SCARA robots used in manufacturing?
SCARA robots are used in manufacturing for high-speed, precision tasks such as assembly, pick-and-place, packaging, and dispensing, enhancing productivity and consistency on production lines.
What industries use Delta robots most?
Delta robots are most commonly used in the packaging, pharmaceuticals, electronics assembly, food processing, and automotive industries.
Which applications are best suited for SCARA robots?
SCARA robots are best suited for pick-and-place tasks, assembly operations, packaging, and precise material handling in electronics manufacturing, automotive assembly, and consumer goods production.
What are the advantages of using Delta robots?
Delta robots offer advantages including high speed and acceleration, precise and repeatable movements, lightweight arms for reduced inertia, excellent payload-to-weight ratio, enhanced rigidity, and suitability for tasks like pick-and-place, assembly, and packaging in industries such as electronics, pharmaceuticals, and food processing.