Synchronous motors operate at constant speed, synchronized with the power supply frequency, making them ideal for precision applications. Asynchronous motors, also known as induction motors, run below synchronous speed due to slip, offering robust performance and low maintenance in industrial settings. Explore the key differences and advantages of synchronous and asynchronous motors to optimize your electric motor selection.
Main Difference
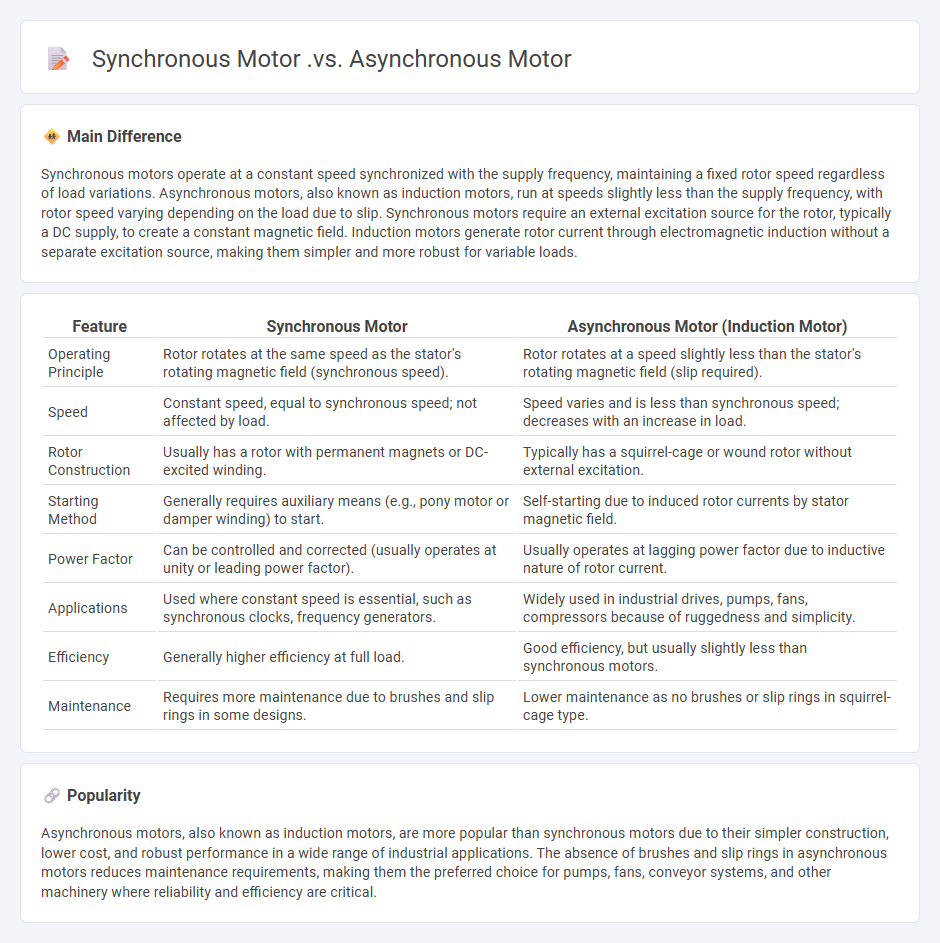
Synchronous motors operate at a constant speed synchronized with the supply frequency, maintaining a fixed rotor speed regardless of load variations. Asynchronous motors, also known as induction motors, run at speeds slightly less than the supply frequency, with rotor speed varying depending on the load due to slip. Synchronous motors require an external excitation source for the rotor, typically a DC supply, to create a constant magnetic field. Induction motors generate rotor current through electromagnetic induction without a separate excitation source, making them simpler and more robust for variable loads.
Connection
Synchronous motors are typically connected to a constant frequency power supply, ensuring their rotor speed matches the supply frequency precisely, while asynchronous motors (induction motors) are connected to the same AC power but operate with a slip between rotor speed and supply frequency. Both motor types are commonly connected in parallel to the three-phase AC supply in industrial applications, using slip rings or squirrel cage rotors respectively. Proper connections involve ensuring correct phase alignment, appropriate starting methods, and protective devices to handle voltage, current, and load conditions effectively.
Comparison Table
| Feature | Synchronous Motor | Asynchronous Motor (Induction Motor) |
|---|---|---|
| Operating Principle | Rotor rotates at the same speed as the stator's rotating magnetic field (synchronous speed). | Rotor rotates at a speed slightly less than the stator's rotating magnetic field (slip required). |
| Speed | Constant speed, equal to synchronous speed; not affected by load. | Speed varies and is less than synchronous speed; decreases with an increase in load. |
| Rotor Construction | Usually has a rotor with permanent magnets or DC-excited winding. | Typically has a squirrel-cage or wound rotor without external excitation. |
| Starting Method | Generally requires auxiliary means (e.g., pony motor or damper winding) to start. | Self-starting due to induced rotor currents by stator magnetic field. |
| Power Factor | Can be controlled and corrected (usually operates at unity or leading power factor). | Usually operates at lagging power factor due to inductive nature of rotor current. |
| Applications | Used where constant speed is essential, such as synchronous clocks, frequency generators. | Widely used in industrial drives, pumps, fans, compressors because of ruggedness and simplicity. |
| Efficiency | Generally higher efficiency at full load. | Good efficiency, but usually slightly less than synchronous motors. |
| Maintenance | Requires more maintenance due to brushes and slip rings in some designs. | Lower maintenance as no brushes or slip rings in squirrel-cage type. |
Speed Synchronization
Speed synchronization in engineering ensures that rotating components such as gears, motors, and turbines operate at matching speeds to prevent mechanical stress and wear. This process is critical in industries like automotive transmission systems and power generation, where precise synchronization maintains operational efficiency and safety. Technologies such as electronic speed controllers and synchronization drives enable real-time adjustments to achieve uniform rotational speed. Effective speed synchronization extends equipment lifespan and optimizes energy consumption in complex mechanical assemblies.
Rotor Construction
Rotor construction in engineering involves designing the rotating component of machines such as electric motors, turbines, and generators. It requires selecting materials like laminated silicon steel for electromagnetic efficiency and balancing mechanical strength with thermal conductivity. Precise machining ensures minimal vibration and optimal alignment within the stator to maintain performance and reduce wear. Advanced rotor designs incorporate features like squirrel-cage bars in induction motors or permanent magnets in synchronous machines to enhance efficiency and power density.
Starting Mechanism
Starting mechanisms in engineering are critical for initiating the operation of engines and machines by converting energy sources into mechanical motion. Common types include electric starters, pneumatic starters, and hydraulic starters, each optimized for specific engine sizes and applications. Electric starters, widely used in automotive and industrial engines, rely on battery power to drive a starter motor that engages the engine flywheel. Advances in starting technology focus on improving reliability, reducing energy consumption, and enabling smooth, automatic engine initiation in complex systems like aerospace and heavy machinery.
Power Factor
Power factor in engineering measures the efficiency of electrical power usage in AC circuits, defined as the ratio of real power (watts) to apparent power (volt-amperes). A power factor close to 1 indicates minimal reactive power, which reduces energy loss and improves system stability in industrial and commercial electrical systems. Low power factor causes increased current flow, leading to higher losses in electrical components such as transformers and generators. Utilities often impose penalties for low power factor to encourage corrective measures like capacitor bank installations or synchronous condensers.
Application Suitability
Application suitability in engineering focuses on aligning materials, technologies, and processes with specific project requirements to maximize performance and efficiency. Engineers evaluate factors such as environmental conditions, load capacity, and durability to determine the optimal choice for structural components or systems. Advanced simulation tools and real-world testing contribute to validating the suitability of engineering applications in sectors like aerospace, civil infrastructure, and automotive manufacturing. Ensuring precise application suitability reduces failure risks and enhances overall system reliability.
Source and External Links
Top 5 Differences Between Synchronous Motor And Asynchronous Motor - Synchronous motors run at constant speed with rotor speed exactly equal to the stator magnetic field speed, while asynchronous motors run at slightly slower rotor speed than the stator field causing slip; rotor construction also differs, with synchronous motors having wound rotor or magnets and asynchronous motors typically having squirrel cage rotors.
Difference Between Synchronous and Asynchronous Motors - Synchronous motors are not self-starting and run at constant speed driven by DC-excited rotor, whereas asynchronous motors are self-starting with rotor induced by stator magnetic field and operate at slip speed below synchronous speed.
Synchronous Motor vs. Induction Motor - Thomson Lamination Co., Inc. - The core difference is synchronous motors operate without slip (rotor speed equals stator field speed), requiring separate excitation for the rotor, while induction (asynchronous) motors require slip for torque generation and utilize rotor current induced by the stator field, enabling self-starting capability.
FAQs
What is a synchronous motor?
A synchronous motor is an AC motor that operates at a constant speed synchronized with the frequency of the supply current.
What is an asynchronous motor?
An asynchronous motor is an electric motor in which the rotor rotates at a speed different from the synchronous speed of the stator's rotating magnetic field.
How does a synchronous motor work?
A synchronous motor operates by rotating its rotor at the same speed as the stator's rotating magnetic field, achieved through electromagnetic torque generated by the interaction of the rotor's magnetic field and the stator's rotating field.
How does an asynchronous motor operate?
An asynchronous motor operates by inducing a rotating magnetic field in the stator, which generates a current in the rotor bars; this induced current produces its own magnetic field that interacts with the stator field, causing the rotor to spin at a speed slightly less than the synchronous speed, creating torque.
What are the main differences between synchronous and asynchronous motors?
Synchronous motors operate at a constant speed synchronized with the supply frequency, using a rotor with DC excitation or permanent magnets, while asynchronous (induction) motors run at speeds slightly less than synchronous speed with rotor currents induced by the stator's rotating magnetic field.
Where are synchronous and asynchronous motors commonly used?
Synchronous motors are commonly used in precise speed control applications such as robotics, conveyors, and clocks, while asynchronous motors, also known as induction motors, are widely used in household appliances, industrial machinery, and HVAC systems due to their robustness and cost-effectiveness.
What are the advantages of synchronous motors over asynchronous motors?
Synchronous motors offer higher efficiency, precise speed control, better power factor correction, and stable operation at constant speed compared to asynchronous motors.