Closed-loop control systems continuously monitor output feedback to adjust inputs and achieve desired performance, enhancing accuracy and stability. Open-loop control systems operate solely based on preset inputs without feedback, making them simpler but less adaptable to disturbances. Explore the differences and applications of closed-loop and open-loop control to optimize system design.
Main Difference
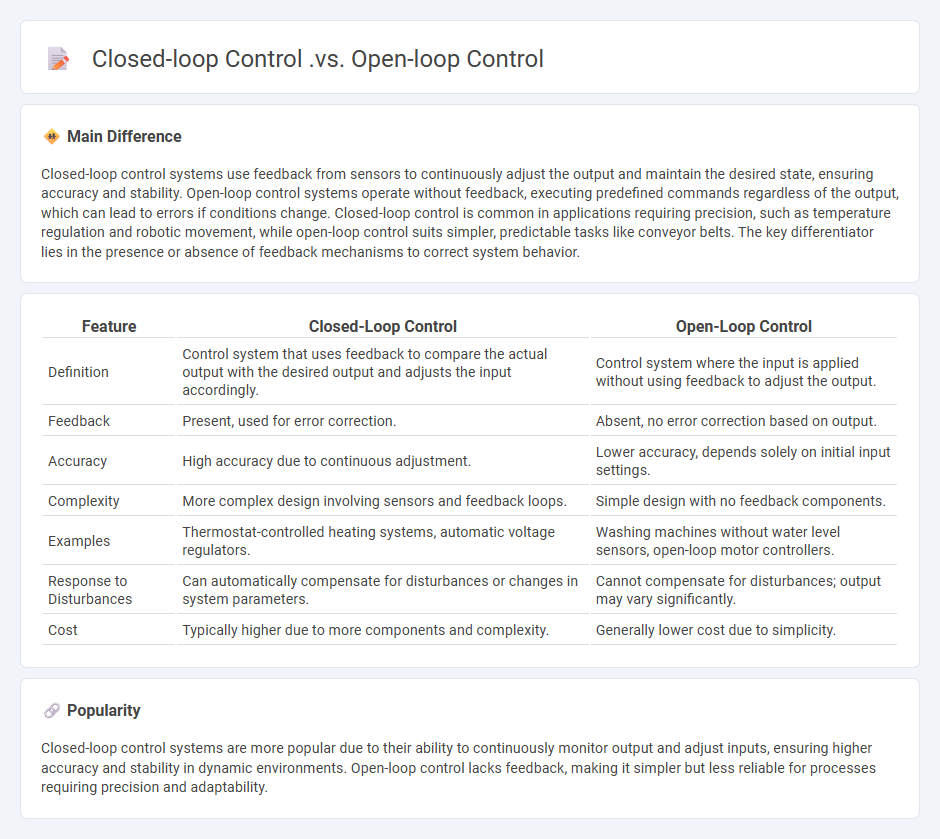
Closed-loop control systems use feedback from sensors to continuously adjust the output and maintain the desired state, ensuring accuracy and stability. Open-loop control systems operate without feedback, executing predefined commands regardless of the output, which can lead to errors if conditions change. Closed-loop control is common in applications requiring precision, such as temperature regulation and robotic movement, while open-loop control suits simpler, predictable tasks like conveyor belts. The key differentiator lies in the presence or absence of feedback mechanisms to correct system behavior.
Connection
Closed-loop control and open-loop control are interconnected through their roles in automated systems; open-loop control operates without feedback, executing predetermined commands, while closed-loop control continuously monitors output via sensors to adjust inputs for desired performance. Systems often integrate open-loop mechanisms within closed-loop frameworks to enhance precision and adaptability, leveraging feedback to correct any deviations from setpoints. The integration fosters improved stability, accuracy, and error minimization in dynamic environments, crucial in robotics, manufacturing, and process control industries.
Comparison Table
| Feature | Closed-Loop Control | Open-Loop Control |
|---|---|---|
| Definition | Control system that uses feedback to compare the actual output with the desired output and adjusts the input accordingly. | Control system where the input is applied without using feedback to adjust the output. |
| Feedback | Present, used for error correction. | Absent, no error correction based on output. |
| Accuracy | High accuracy due to continuous adjustment. | Lower accuracy, depends solely on initial input settings. |
| Complexity | More complex design involving sensors and feedback loops. | Simple design with no feedback components. |
| Examples | Thermostat-controlled heating systems, automatic voltage regulators. | Washing machines without water level sensors, open-loop motor controllers. |
| Response to Disturbances | Can automatically compensate for disturbances or changes in system parameters. | Cannot compensate for disturbances; output may vary significantly. |
| Cost | Typically higher due to more components and complexity. | Generally lower cost due to simplicity. |
Feedback
Engineering feedback involves systematic evaluation of design, processes, or products to improve performance and quality. It includes collecting data from sensors, simulations, and tests to identify defects or inefficiencies. Incorporating feedback loops in control systems enhances stability and responsiveness, crucial in fields like aerospace and robotics. Effective feedback mechanisms accelerate innovation and ensure compliance with industry standards such as ISO 9001.
Setpoint
In engineering, a setpoint is the precise target value a control system aims to maintain for a specific process variable such as temperature, pressure, or flow rate. It serves as the reference input for controllers like PID (Proportional-Integral-Derivative) systems to minimize deviation and optimize system performance. Accurate setpoint management enhances system stability, reduces energy consumption, and ensures product quality in industrial automation. Modern control systems integrate real-time data monitoring and adaptive algorithms to dynamically adjust setpoints based on operational conditions.
Disturbance Rejection
Disturbance rejection in engineering refers to the ability of a control system to maintain desired performance despite external and internal disturbances. Effective disturbance rejection minimizes the impact of noise, load variations, and system uncertainties, enhancing stability and accuracy. Techniques such as PID control, state feedback, and adaptive control are commonly implemented to improve disturbance rejection capabilities. Industrial applications in robotics, aerospace, and process control heavily rely on robust disturbance rejection to ensure operational reliability.
System Stability
System stability in engineering ensures that a system returns to equilibrium after a disturbance, preventing uncontrolled behavior or failure. It is analyzed using methods like the Lyapunov stability theory and root locus techniques, which assess the response of dynamic systems. Applications span control systems, electrical grids, and mechanical structures, where maintaining stability enhances safety and reliability. Engineers use tools such as Bode plots and eigenvalue analysis to predict and improve system stability under various operating conditions.
Automation
Automation in engineering enhances precision and efficiency by integrating advanced robotics, control systems, and artificial intelligence into manufacturing and design processes. It reduces human error and operational costs while increasing production speed and consistency in industries such as automotive, aerospace, and electronics. Real-time data collection and machine learning algorithms enable predictive maintenance and optimized system performance. Automation-driven engineering fosters innovation by enabling rapid prototyping and complex system simulations.
Source and External Links
Know when to use open- or closed-loop control - Control Engineering - Closed-loop control systems use feedback to automatically adjust outputs for accuracy and disturbance correction, making them suitable for automated settings, while open-loop systems operate purely on input commands without feedback, often requiring human intervention and being simpler but less accurate.
What is the difference between an open loop stepper motor and a closed loop stepper motor - Open-loop control cannot detect or correct errors and is sensitive to changes, suitable for simple or low-accuracy tasks, whereas closed-loop control uses feedback to correct errors, improving accuracy and robustness, but at the cost of greater complexity.
Difference between open loop and closed loop control system - Closed-loop systems incorporate feedback to monitor output and autonomously adjust inputs for desired results, enhancing accuracy, stability, and disturbance rejection, while open-loop systems lack feedback, operate on preset inputs, and cannot self-correct errors, resulting in simpler but less adaptive controls.
FAQs
What is open-loop control?
Open-loop control is a type of control system where the output is not measured or fed back for correction; the system operates based on preset inputs without adjusting for disturbances or changes.
What is closed-loop control?
Closed-loop control is a system that continuously monitors output feedback to automatically adjust inputs and maintain the desired performance.
How do open-loop and closed-loop systems differ?
Open-loop systems operate without feedback, while closed-loop systems use feedback to self-correct and adjust performance.
What are examples of open-loop control systems?
Examples of open-loop control systems include a washing machine timer, a traffic light controller, an electric kettle without a thermostat, and a simple irrigation system.
What are examples of closed-loop control systems?
Examples of closed-loop control systems include thermostats regulating room temperature, cruise control systems maintaining vehicle speed, and automatic voltage regulators stabilizing electrical output.
What are the advantages of closed-loop control?
Closed-loop control offers precise system regulation, improved accuracy, reduced sensitivity to disturbances, automatic error correction, enhanced stability, and adaptability to changing conditions.
When should you use open-loop control?
Use open-loop control when the system operates in a stable, predictable environment without disturbances, and feedback is unnecessary for maintaining desired performance.