Force feedback simulates physical forces by applying resistance or vibrations to devices like gaming controllers, enhancing realism in virtual environments. Haptic feedback encompasses a broader range of tactile sensations, including vibrations, textures, and temperature changes, often delivered through smartphones or wearable technology. Explore the distinct applications and advantages of force feedback and haptic feedback for immersive user experiences.
Main Difference
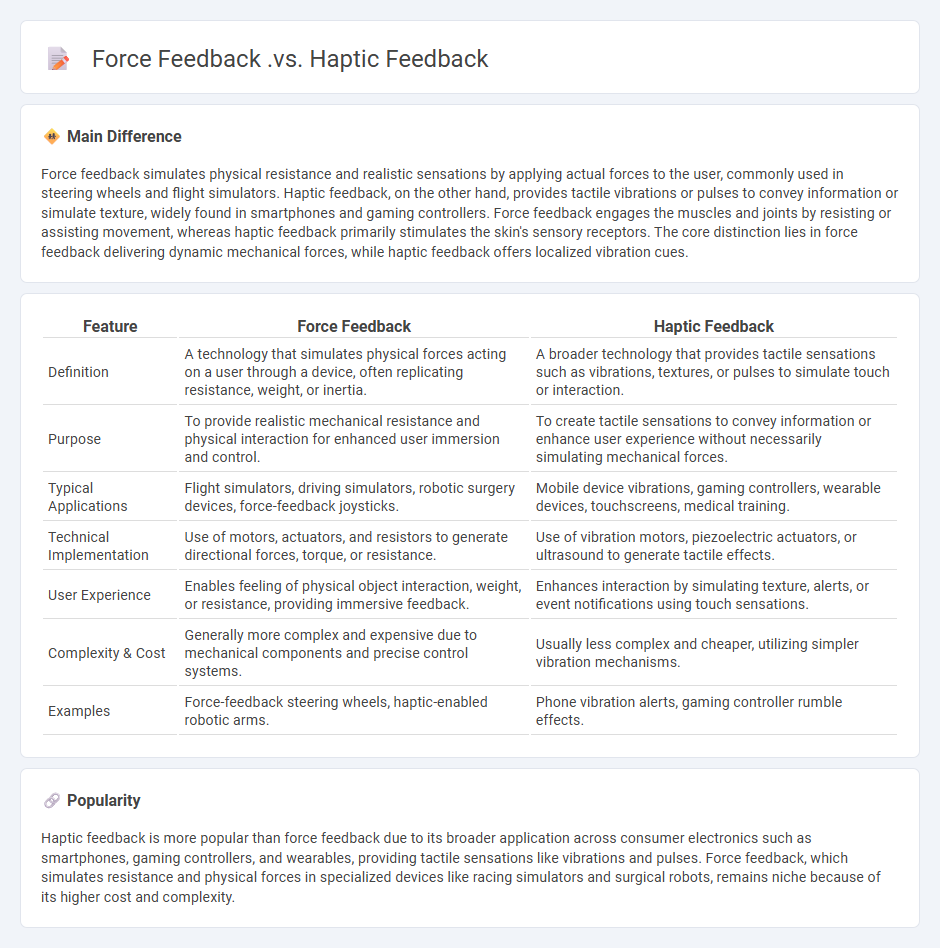
Force feedback simulates physical resistance and realistic sensations by applying actual forces to the user, commonly used in steering wheels and flight simulators. Haptic feedback, on the other hand, provides tactile vibrations or pulses to convey information or simulate texture, widely found in smartphones and gaming controllers. Force feedback engages the muscles and joints by resisting or assisting movement, whereas haptic feedback primarily stimulates the skin's sensory receptors. The core distinction lies in force feedback delivering dynamic mechanical forces, while haptic feedback offers localized vibration cues.
Connection
Force feedback and haptic feedback are closely connected as both technologies enhance user interaction by simulating tactile sensations through mechanical forces. Force feedback specifically refers to the generation of resistance or force to mimic real-world physical interactions, commonly used in gaming controllers and simulators. Haptic feedback encompasses a broader range of tactile responses, including vibrations and pressure, providing immersive sensory experiences in devices like smartphones, VR controllers, and medical simulators.
Comparison Table
| Feature | Force Feedback | Haptic Feedback |
|---|---|---|
| Definition | A technology that simulates physical forces acting on a user through a device, often replicating resistance, weight, or inertia. | A broader technology that provides tactile sensations such as vibrations, textures, or pulses to simulate touch or interaction. |
| Purpose | To provide realistic mechanical resistance and physical interaction for enhanced user immersion and control. | To create tactile sensations to convey information or enhance user experience without necessarily simulating mechanical forces. |
| Typical Applications | Flight simulators, driving simulators, robotic surgery devices, force-feedback joysticks. | Mobile device vibrations, gaming controllers, wearable devices, touchscreens, medical training. |
| Technical Implementation | Use of motors, actuators, and resistors to generate directional forces, torque, or resistance. | Use of vibration motors, piezoelectric actuators, or ultrasound to generate tactile effects. |
| User Experience | Enables feeling of physical object interaction, weight, or resistance, providing immersive feedback. | Enhances interaction by simulating texture, alerts, or event notifications using touch sensations. |
| Complexity & Cost | Generally more complex and expensive due to mechanical components and precise control systems. | Usually less complex and cheaper, utilizing simpler vibration mechanisms. |
| Examples | Force-feedback steering wheels, haptic-enabled robotic arms. | Phone vibration alerts, gaming controller rumble effects. |
Tactile Sensation
Tactile sensation in engineering involves the design and development of systems that replicate the sense of touch through sensors and actuators. Technologies such as haptic feedback, pressure sensors, and force feedback devices are integrated into robotics, prosthetics, and virtual reality to enhance user interaction and precision. Advances in materials science, including piezoelectric and capacitive sensors, improve the sensitivity and responsiveness of tactile systems. Research focuses on improving spatial resolution and dynamic range to closely mimic human skin's tactile capabilities.
Mechanical Resistance
Mechanical resistance refers to the ability of a material or structure to withstand applied forces without failure or deformation. It is quantified through properties such as tensile strength, yield strength, and hardness, which depend on the material's composition and microstructure. In engineering, mechanical resistance is critical for designing components that endure stress, strain, and impact during service. Advanced materials like high-strength steel, carbon fiber composites, and titanium alloys are commonly used to maximize mechanical resistance in structural applications.
Actuator Technology
Actuator technology plays a critical role in engineering by converting electrical, hydraulic, or pneumatic energy into mechanical motion. Modern actuators include electric motors, hydraulic cylinders, and pneumatic pistons, each optimized for specific force, speed, and precision requirements. Advances in smart actuators integrate sensors and control systems to enable real-time feedback and adaptive performance in automation and robotics. The global actuator market was valued at approximately $20 billion in 2023, driven by growth in automotive, aerospace, and industrial applications.
User Immersion
User immersion in engineering focuses on creating highly interactive and realistic environments that enhance user engagement with technological systems. Advanced simulation tools and virtual reality (VR) platforms enable engineers to design, test, and optimize products by immersing users in detailed digital prototypes. This approach improves understanding of complex engineering concepts and facilitates more intuitive human-machine interactions. Enhancements in sensor technology and real-time data processing further contribute to achieving seamless immersion experiences.
Real-Time Response
Real-time response in engineering refers to systems designed to process data and provide outputs within strict time constraints to ensure immediate action. These systems are critical in applications such as automotive safety controls, industrial automation, and aerospace navigation, where delays can lead to system failures or safety hazards. Utilizing real-time operating systems (RTOS) and deterministic communication protocols ensures predictable latency and reliable performance. Advances in sensor technology and edge computing have further enhanced the capability of real-time response systems to handle complex tasks with minimal delay.
Source and External Links
What is Force Feedback: Explained - Iris Dynamics - Force feedback simulates real-world physical touch by generating significant forces you can feel with your muscles, while haptic feedback uses smaller forces (like vibration) that are mostly felt through nerves in your skin.
Rehabilitation and Force Feedback - Iris Dynamics - Force feedback involves the perception and reaction to varying levels of force, essential for movement and control, whereas haptics broadly refer to any information about touch, which can be conveyed by devices using vibrations or other tactile stimuli.
How to describe haptic feedback - Why naming haptics is so hard - The distinction is mainly about the strength and application: haptic feedback covers all tactile sensations, including subtle vibrations in handheld devices, while force feedback refers specifically to stronger, often directional forces used in controls and simulators.
FAQs
What is force feedback?
Force feedback is a technology that provides tactile sensations by applying physical forces to a user, enhancing interaction realism in devices like gaming controllers, steering wheels, and virtual reality equipment.
What is haptic feedback?
Haptic feedback is a tactile response technology that simulates the sense of touch through vibrations, forces, or motions to enhance user interaction with devices.
How does force feedback work?
Force feedback works by using motors or actuators to apply physical resistance or vibrations to the user, simulating real-world touch sensations based on sensor data and software algorithms.
How does haptic feedback work?
Haptic feedback works by using actuators to apply vibrations, forces, or motions to the user's skin, simulating the sense of touch to convey information or enhance interaction in devices like smartphones, gaming controllers, and virtual reality systems.
What is the difference between force feedback and haptic feedback?
Force feedback provides physical resistance or forces to simulate real-world interactions, while haptic feedback encompasses a broader range of tactile sensations, including vibrations and texture changes.
Where is force feedback commonly used?
Force feedback is commonly used in gaming controllers, flight simulators, and virtual reality systems to enhance user interaction and realism.
Where is haptic feedback commonly used?
Haptic feedback is commonly used in smartphones, gaming controllers, virtual reality devices, and wearable technology.