Model Predictive Control (MPC) leverages real-time system models and optimization algorithms to predict and control future behavior, ensuring constraint satisfaction and optimal performance. Adaptive Control continuously adjusts control parameters based on real-time feedback and changing system dynamics, enhancing robustness in uncertain environments. Explore their differences, applications, and benefits to determine the best approach for your control system needs.
Main Difference
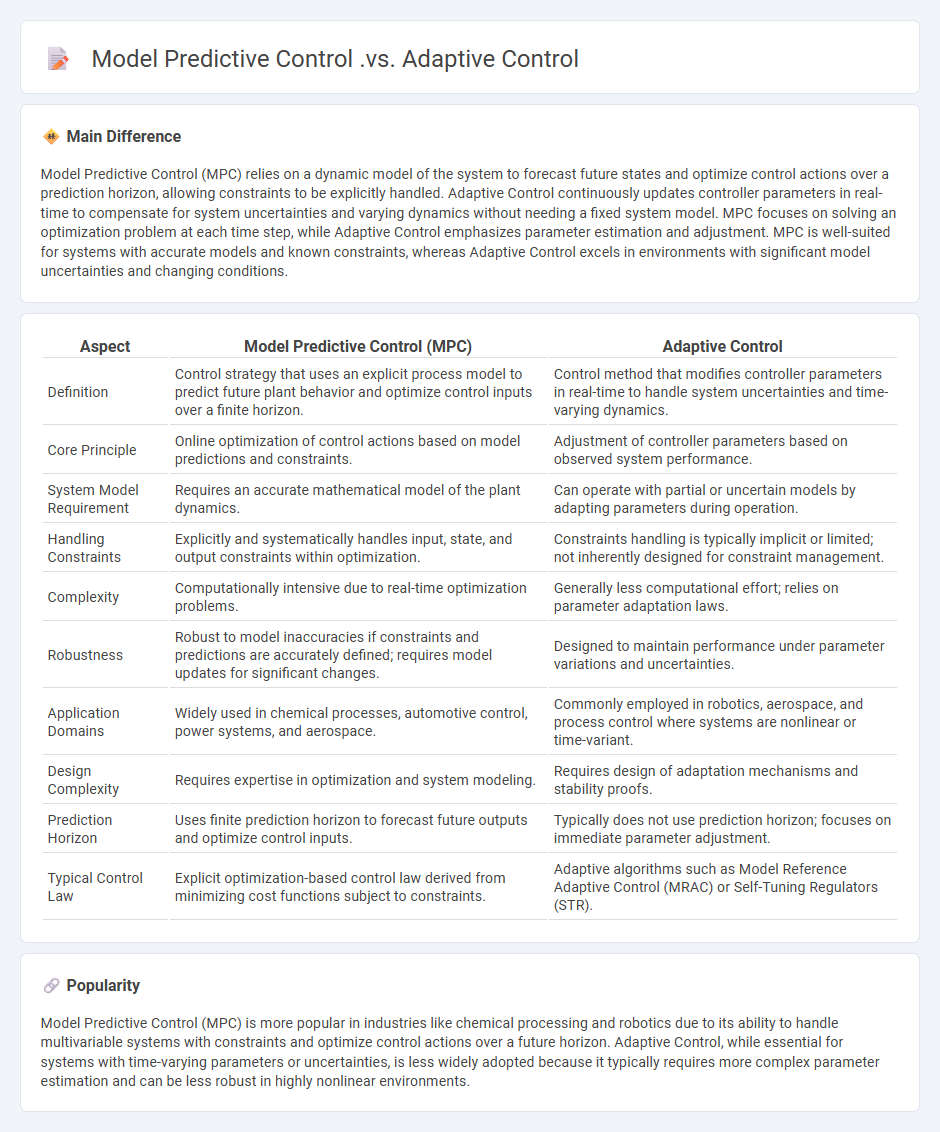
Model Predictive Control (MPC) relies on a dynamic model of the system to forecast future states and optimize control actions over a prediction horizon, allowing constraints to be explicitly handled. Adaptive Control continuously updates controller parameters in real-time to compensate for system uncertainties and varying dynamics without needing a fixed system model. MPC focuses on solving an optimization problem at each time step, while Adaptive Control emphasizes parameter estimation and adjustment. MPC is well-suited for systems with accurate models and known constraints, whereas Adaptive Control excels in environments with significant model uncertainties and changing conditions.
Connection
Model Predictive Control (MPC) and Adaptive Control both enhance system performance by adjusting control actions based on real-time system dynamics and constraints. MPC uses a dynamic model to predict future outputs and optimize control inputs over a finite horizon, while Adaptive Control continuously updates controller parameters to handle uncertainties and varying system parameters. Integrating MPC with Adaptive Control enables robust, optimal decision-making in systems with time-varying or uncertain models, improving stability and performance in complex applications.
Comparison Table
| Aspect | Model Predictive Control (MPC) | Adaptive Control |
|---|---|---|
| Definition | Control strategy that uses an explicit process model to predict future plant behavior and optimize control inputs over a finite horizon. | Control method that modifies controller parameters in real-time to handle system uncertainties and time-varying dynamics. |
| Core Principle | Online optimization of control actions based on model predictions and constraints. | Adjustment of controller parameters based on observed system performance. |
| System Model Requirement | Requires an accurate mathematical model of the plant dynamics. | Can operate with partial or uncertain models by adapting parameters during operation. |
| Handling Constraints | Explicitly and systematically handles input, state, and output constraints within optimization. | Constraints handling is typically implicit or limited; not inherently designed for constraint management. |
| Complexity | Computationally intensive due to real-time optimization problems. | Generally less computational effort; relies on parameter adaptation laws. |
| Robustness | Robust to model inaccuracies if constraints and predictions are accurately defined; requires model updates for significant changes. | Designed to maintain performance under parameter variations and uncertainties. |
| Application Domains | Widely used in chemical processes, automotive control, power systems, and aerospace. | Commonly employed in robotics, aerospace, and process control where systems are nonlinear or time-variant. |
| Design Complexity | Requires expertise in optimization and system modeling. | Requires design of adaptation mechanisms and stability proofs. |
| Prediction Horizon | Uses finite prediction horizon to forecast future outputs and optimize control inputs. | Typically does not use prediction horizon; focuses on immediate parameter adjustment. |
| Typical Control Law | Explicit optimization-based control law derived from minimizing cost functions subject to constraints. | Adaptive algorithms such as Model Reference Adaptive Control (MRAC) or Self-Tuning Regulators (STR). |
Prediction Horizon
Prediction horizon in engineering refers to the future time span over which a model or system forecasts or predicts behavior, performance, or states. It is a critical parameter in model predictive control (MPC), where control actions are optimized based on expected future system outputs within this horizon. A longer prediction horizon can improve control accuracy but increases computational complexity and response time. Typical applications include robotics, process control, and autonomous vehicle navigation, where accurate future state estimation enhances decision-making and system stability.
Real-time Optimization
Real-time optimization in engineering involves continuously adjusting system parameters to improve performance and efficiency during operation. It relies on advanced algorithms, sensor data, and computational models to make immediate decisions, reducing downtime and adapting to changing conditions. Industries like manufacturing, energy, and aerospace utilize real-time optimization to enhance production rates, minimize energy consumption, and ensure safety. Implementing real-time optimization can lead to significant cost savings and increased reliability in complex engineering systems.
Parameter Adaptation
Parameter adaptation in engineering involves the dynamic tuning of system variables to optimize performance under varying conditions. Techniques such as adaptive control algorithms utilize real-time data to adjust parameters, enhancing system stability and efficiency. Applications range from aerospace systems where flight control parameters adjust during different flight phases, to robotics where sensor feedback continuously refines actuator responses. This approach reduces the need for manual recalibration, resulting in improved robustness and operational accuracy.
System Uncertainties
System uncertainties in engineering refer to unknown or unpredictable variations within system parameters, environmental conditions, or modeling assumptions that affect system performance and reliability. These uncertainties can arise from measurement errors, component tolerances, or external disturbances, impacting the accuracy of simulations and designs. Robust engineering practices incorporate probabilistic models and sensitivity analyses to mitigate the effects of system uncertainties, enhancing overall system stability and safety. Addressing uncertainties is critical in fields such as aerospace, automotive, and control systems engineering to ensure optimal functionality under varying operational conditions.
Control Performance
Control performance in engineering refers to the effectiveness and accuracy with which a control system manages the behavior of dynamic processes. Key metrics include stability, response time, overshoot, and steady-state error, which collectively determine how well the system meets design specifications. Techniques such as PID (Proportional-Integral-Derivative) control, state-space methods, and model predictive control are commonly used to optimize performance in applications ranging from manufacturing automation to aerospace systems. Evaluating these performance indicators ensures improved system reliability, efficiency, and safety in industrial control engineering.
Source and External Links
Model Predictive Control (MPC) - MPC is a control strategy that solves an optimization problem at each time step to predict and control the future behavior of a system based on a model.
Adaptive Model Predictive Control (Adaptive MPC) - Adaptive MPC adapts the prediction model for changing operating conditions, allowing it to handle nonlinear or time-varying systems more effectively.
Adaptive Control with MPC - This approach combines MPC with adaptive control techniques, such as L1 adaptive control, to improve robustness against model uncertainties and disturbances.
FAQs
What is Model Predictive Control?
Model Predictive Control (MPC) is an advanced control strategy that uses a dynamic model of a system to predict and optimize future behavior by solving a constrained optimization problem at each control step.
What is Adaptive Control?
Adaptive control is a control strategy where the controller parameters automatically adjust in real-time to cope with changing system dynamics and uncertainties.
How does Model Predictive Control work?
Model Predictive Control (MPC) optimizes future control actions by solving a constrained optimization problem at each time step, using a dynamic model to predict system behavior over a finite horizon and implementing the first control input before repeating the process.
How does Adaptive Control differ from Model Predictive Control?
Adaptive Control continuously updates controller parameters based on real-time system behavior without relying on a fixed model, while Model Predictive Control uses a fixed dynamic model to predict future system outputs and optimize control inputs over a finite horizon.
What are the main applications of Model Predictive Control?
Model Predictive Control is mainly applied in process industries, automotive control, robotics, energy management, and aerospace systems for optimizing performance and handling constraints.
What are the advantages of Adaptive Control?
Adaptive Control offers advantages such as improved system performance under varying conditions, enhanced robustness to parameter uncertainties, real-time adjustment to disturbances, and reduced need for precise modeling of the system.
Which types of systems benefit most from Model Predictive Control or Adaptive Control?
Model Predictive Control benefits systems with multivariable constraints and slow dynamics, such as chemical plants and process industries. Adaptive Control suits systems with uncertain or time-varying parameters, including aerospace systems and robotics.