Control Theory focuses on designing controllers to regulate dynamic systems and ensure desired performance, stability, and robustness. System Identification involves developing mathematical models based on observed input-output data to describe system behavior accurately. Explore deeper insights into how these disciplines complement each other in advanced engineering applications.
Main Difference
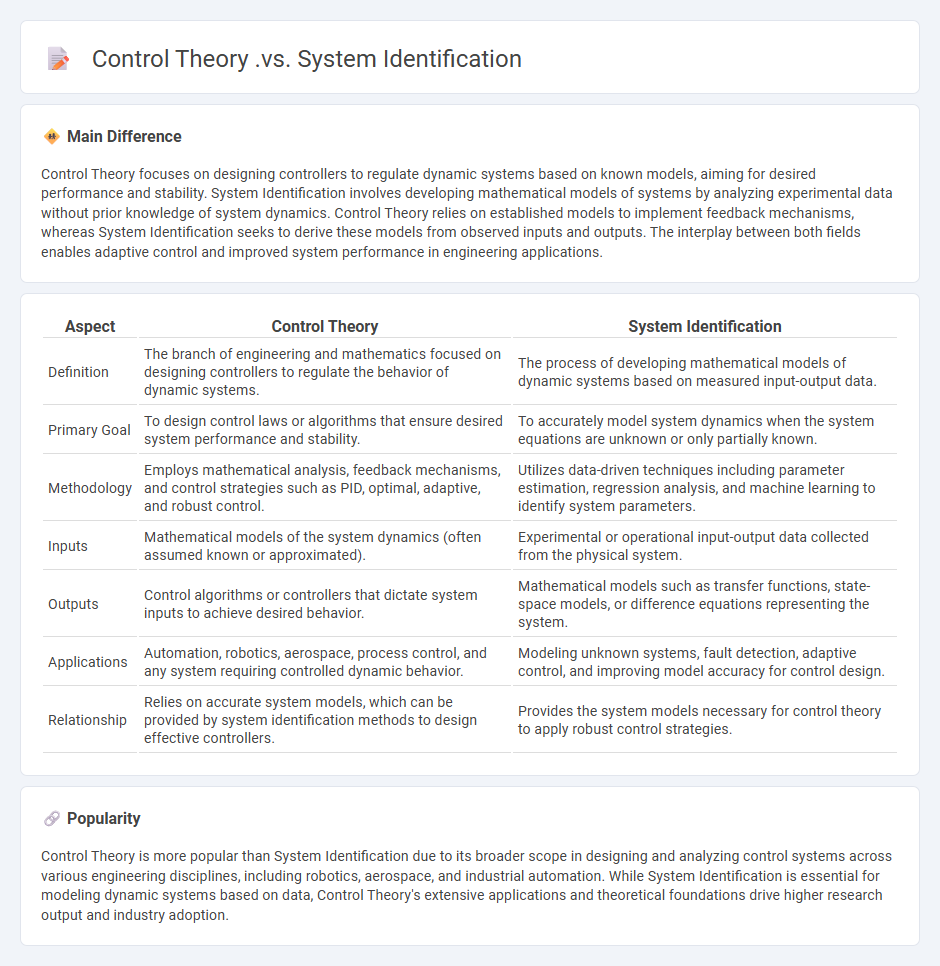
Control Theory focuses on designing controllers to regulate dynamic systems based on known models, aiming for desired performance and stability. System Identification involves developing mathematical models of systems by analyzing experimental data without prior knowledge of system dynamics. Control Theory relies on established models to implement feedback mechanisms, whereas System Identification seeks to derive these models from observed inputs and outputs. The interplay between both fields enables adaptive control and improved system performance in engineering applications.
Connection
Control Theory relies on accurate mathematical models to design controllers that regulate system behavior, and System Identification provides these models by analyzing input-output data to estimate system parameters. The connection is fundamental as System Identification bridges the gap between theoretical control designs and practical applications by enabling model-based control strategies. Effective integration of System Identification enhances the precision and robustness of Control Theory implementations across various engineering systems.
Comparison Table
| Aspect | Control Theory | System Identification |
|---|---|---|
| Definition | The branch of engineering and mathematics focused on designing controllers to regulate the behavior of dynamic systems. | The process of developing mathematical models of dynamic systems based on measured input-output data. |
| Primary Goal | To design control laws or algorithms that ensure desired system performance and stability. | To accurately model system dynamics when the system equations are unknown or only partially known. |
| Methodology | Employs mathematical analysis, feedback mechanisms, and control strategies such as PID, optimal, adaptive, and robust control. | Utilizes data-driven techniques including parameter estimation, regression analysis, and machine learning to identify system parameters. |
| Inputs | Mathematical models of the system dynamics (often assumed known or approximated). | Experimental or operational input-output data collected from the physical system. |
| Outputs | Control algorithms or controllers that dictate system inputs to achieve desired behavior. | Mathematical models such as transfer functions, state-space models, or difference equations representing the system. |
| Applications | Automation, robotics, aerospace, process control, and any system requiring controlled dynamic behavior. | Modeling unknown systems, fault detection, adaptive control, and improving model accuracy for control design. |
| Relationship | Relies on accurate system models, which can be provided by system identification methods to design effective controllers. | Provides the system models necessary for control theory to apply robust control strategies. |
Feedback Mechanisms
Feedback mechanisms in engineering are critical for controlling systems by automatically adjusting processes based on real-time data. These mechanisms utilize sensors to monitor variables such as temperature, pressure, or speed, sending information to controllers that compare actual performance against desired setpoints. Proportional-Integral-Derivative (PID) controllers exemplify common feedback systems, optimizing stability and responsiveness in applications from robotics to aerospace engineering. Effective feedback loops improve efficiency, reduce errors, and enhance the reliability of complex machinery and infrastructure.
Mathematical Modeling
Mathematical modeling in engineering involves creating abstract representations of physical systems using mathematical language and equations to analyze and predict system behavior. It is widely applied across disciplines such as mechanical, civil, electrical, and chemical engineering to optimize design, control processes, and enhance performance. Techniques include differential equations, finite element analysis, and computational simulations, leveraging software like MATLAB and ANSYS for precise modeling. Accurate mathematical models are essential for solving complex engineering problems and improving innovation efficiency.
Parameter Estimation
Parameter estimation in engineering involves determining the values of model parameters that best fit observed data, enhancing system accuracy and performance. Techniques such as least squares, maximum likelihood estimation, and Kalman filtering are widely used across disciplines including control systems, signal processing, and structural analysis. Accurate parameter estimation enables predictive modeling and optimization in complex engineering systems, improving reliability and decision-making. Tools like MATLAB and Python libraries (e.g., SciPy) facilitate computational implementation of these estimation methods.
System Dynamics
System Dynamics in engineering focuses on modeling and analyzing complex feedback systems to optimize performance and predict behavior over time. It employs differential equations and causal loop diagrams to simulate mechanical, electrical, and thermal system interactions precisely. Engineers utilize system dynamics for control system design, process optimization, and reliability assessment in industries such as automotive, aerospace, and energy. Advanced software tools like Vensim and Simulink facilitate detailed dynamic modeling and real-time simulation.
Predictive Control
Predictive control in engineering utilizes mathematical models to forecast future system behavior and optimize control actions accordingly. Model Predictive Control (MPC) algorithms solve constrained optimization problems in real-time to enhance system performance and stability. Industries such as chemical processing, robotics, and aerospace widely adopt predictive control for precise regulation and increased efficiency. Advanced predictive control frameworks integrate machine learning techniques to improve accuracy in dynamic and nonlinear environments.
Source and External Links
Identification in Control and Econometrics: Similarities and ... - System identification in control theory involves the iterative process of model specification, parameter estimation, and model verification using data, whereas control theory more broadly includes the design and analysis of controllers to manage system behavior; system identification serves as a foundational step within control system development.
System identification - Wikipedia - System identification is the statistical methodology for building mathematical models of dynamic systems from input-output measured data, often used as a basis for model-based control design, whereas control theory focuses on using models (whether identified or assumed) to design controllers that achieve desired dynamic performance.
What is System identification - System identification involves experimental data collection, experiment design, model structure selection, parameter estimation, and model validation to produce models of dynamic systems that can then be used in control theory to design or tune controllers for desired system behavior.
FAQs
What is Control Theory?
Control Theory is a mathematical framework for designing systems that regulate dynamic processes by using feedback and control signals to achieve desired behavior.
What is System Identification?
System Identification is the process of building mathematical models of dynamic systems based on observed input-output data.
How do Control Theory and System Identification differ?
Control Theory focuses on designing controllers to regulate system behavior, while System Identification involves developing mathematical models of systems from observed data.
What are the main goals of Control Theory?
Control Theory aims to design systems that regulate behavior to achieve stability, maintain desired outputs, and optimize performance despite disturbances.
What are the main steps in System Identification?
The main steps in System Identification are data collection, model structure selection, parameter estimation, model validation, and model refinement.
How is data used in System Identification compared to Control Theory?
Data in System Identification is used primarily to build mathematical models of dynamic systems by estimating system parameters from observed input-output measurements, whereas in Control Theory, data supports real-time system monitoring, feedback design, and controller performance evaluation based on the established models.
When should you use System Identification instead of Control Theory?
Use System Identification when you need to develop a mathematical model of a system based on observed input-output data, especially when the system dynamics are unknown or too complex to derive analytically, whereas Control Theory is applied to design controllers based on an existing system model.