Haptic technology encompasses systems that simulate touch sensations through vibrations, forces, or motions to enhance user interaction in virtual environments, gaming, and medical training. Tactile sensors are devices that detect and measure physical touch, pressure, or texture, playing a crucial role in robotics, prosthetics, and industrial automation. Explore the differences and applications of haptic technology and tactile sensors to understand their impact on sensory feedback advancements.
Main Difference
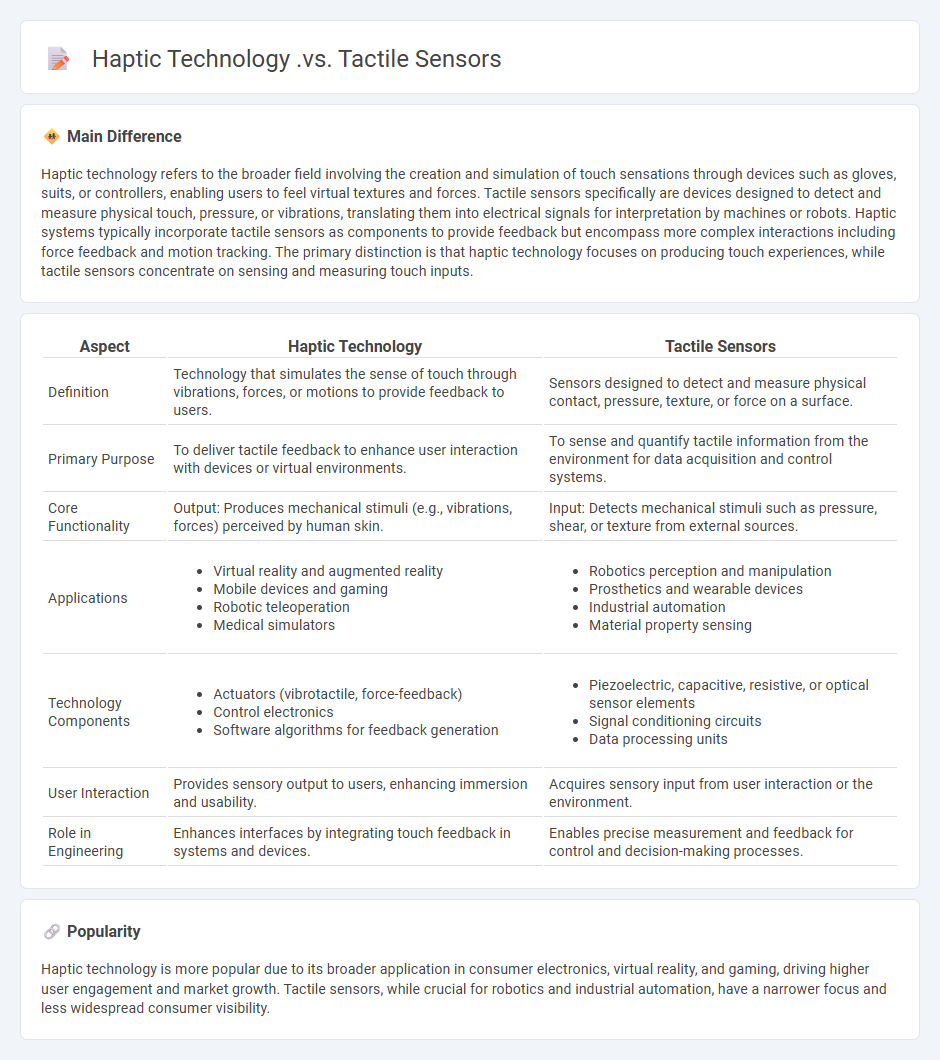
Haptic technology refers to the broader field involving the creation and simulation of touch sensations through devices such as gloves, suits, or controllers, enabling users to feel virtual textures and forces. Tactile sensors specifically are devices designed to detect and measure physical touch, pressure, or vibrations, translating them into electrical signals for interpretation by machines or robots. Haptic systems typically incorporate tactile sensors as components to provide feedback but encompass more complex interactions including force feedback and motion tracking. The primary distinction is that haptic technology focuses on producing touch experiences, while tactile sensors concentrate on sensing and measuring touch inputs.
Connection
Haptic technology relies on tactile sensors to detect and interpret touch, pressure, and texture, enabling realistic feedback in virtual environments. Tactile sensors convert physical interactions into electronic signals that haptic systems use to simulate the sensation of touch. This integration enhances user experiences in robotics, medical simulations, and wearable devices by providing precise and responsive touch feedback.
Comparison Table
| Aspect | Haptic Technology | Tactile Sensors |
|---|---|---|
| Definition | Technology that simulates the sense of touch through vibrations, forces, or motions to provide feedback to users. | Sensors designed to detect and measure physical contact, pressure, texture, or force on a surface. |
| Primary Purpose | To deliver tactile feedback to enhance user interaction with devices or virtual environments. | To sense and quantify tactile information from the environment for data acquisition and control systems. |
| Core Functionality | Output: Produces mechanical stimuli (e.g., vibrations, forces) perceived by human skin. | Input: Detects mechanical stimuli such as pressure, shear, or texture from external sources. |
| Applications |
|
|
| Technology Components |
|
|
| User Interaction | Provides sensory output to users, enhancing immersion and usability. | Acquires sensory input from user interaction or the environment. |
| Role in Engineering | Enhances interfaces by integrating touch feedback in systems and devices. | Enables precise measurement and feedback for control and decision-making processes. |
Haptic Feedback
Haptic feedback in engineering enhances user interaction by providing tactile sensations through devices such as actuators and vibration motors. It is widely applied in robotics, virtual reality systems, and medical simulators to improve precision, safety, and user immersion. Advancements in piezoelectric materials and force feedback technology enable more realistic and responsive touch experiences. Real-world applications include surgical training simulators from companies like CAE Healthcare and immersive VR gloves developed by HaptX.
Tactile Sensing
Tactile sensing in engineering involves the development and integration of sensors that mimic the human sense of touch to detect pressure, texture, and vibration. These sensors use materials such as piezoelectric polymers, capacitive arrays, and conductive elastomers to provide high-resolution spatial and force information. Applications span robotics, prosthetics, and human-machine interfaces where precise interaction with objects is critical. Advances in machine learning algorithms enhance the interpretation of tactile data, enabling more adaptive and sensitive robotic manipulation.
Force Detection
Force detection in engineering involves precise measurement of physical forces such as tension, compression, and shear using sensors like strain gauges, load cells, and piezoelectric devices. These measurements enable critical assessments in structural health monitoring, robotics, and manufacturing processes to ensure safety and performance. Advanced force detection systems integrate with digital control units and IoT platforms for real-time data acquisition and analysis. Accurate force measurement directly contributes to optimizing materials, reducing failures, and improving product reliability across engineering disciplines.
User Interaction
User interaction in engineering focuses on designing systems and interfaces that optimize usability and efficiency, ensuring seamless communication between humans and machines. Techniques such as human-computer interaction (HCI) and user-centered design (UCD) are applied to enhance the functionality and accessibility of engineering products. Recent advancements include the integration of artificial intelligence and augmented reality to improve real-time feedback and user engagement. Effective user interaction minimizes errors and increases productivity in complex engineering environments.
Sensor Integration
Sensor integration in engineering involves combining multiple sensor systems to improve data accuracy and functionality across various applications such as robotics, automotive, and aerospace. Advanced sensor fusion techniques leverage data from accelerometers, gyroscopes, LiDAR, and cameras to enhance environmental perception and decision-making processes. Effective integration reduces noise, compensates for individual sensor limitations, and supports real-time monitoring and control in complex systems. Industry standards like IEEE 1451 facilitate interoperability, ensuring seamless communication between heterogeneous sensors.
Source and External Links
What is the difference between haptic vs tactile sensing? - Graspian - Haptic sensing involves both tactile sensing (detecting force on the skin) and kinesthetic sensing (body movement and muscle strength), whereas tactile sensing is specifically about directly engaging with an object's surface features such as edges and friction to aid grip and object handling.
Understanding The Difference Between Tactile And Haptic Feedback - Tactile feedback relies on physical elements like buttons to enhance natural touch, while haptic feedback uses technology like vibration motors to simulate realistic, artificial touch sensations, thereby bridging the digital and physical interaction experiences.
Haptic technology - Wikipedia - Haptic technology creates the sensation of touch by applying forces, vibrations, or motions and may incorporate tactile sensors that measure forces exerted by the user, with haptic encompassing a broader sense of active touch including kinesthetic perception beyond just tactile surface sensing.
FAQs
What is haptic technology?
Haptic technology is a tactile feedback system that simulates the sense of touch by applying forces, vibrations, or motions to the user.
What are tactile sensors?
Tactile sensors are devices that detect and measure physical interactions such as pressure, force, texture, and vibration on a surface, enabling machines to perceive touch.
How do haptic technology and tactile sensors differ?
Haptic technology refers to the simulation of touch sensations through devices, enabling users to perceive force, vibration, and texture; tactile sensors are hardware components within these systems that detect and measure physical touch parameters like pressure, texture, and shear forces.
What components are used in haptic technology?
Haptic technology components include actuators, sensors, controllers, and feedback mechanisms.
What are the applications of haptic technology?
Haptic technology is used in virtual reality, medical training simulators, robotics control, gaming, mobile devices for tactile feedback, automotive touch interfaces, and remote surgery systems.
Where are tactile sensors commonly used?
Tactile sensors are commonly used in robotics for object manipulation, prosthetics for sensory feedback, and industrial automation for quality control and safety.
Why is haptic feedback important in human-machine interaction?
Haptic feedback enhances human-machine interaction by providing tactile sensations that improve user accuracy, engagement, and intuitive control, leading to more effective and immersive experiences.